





Leírás
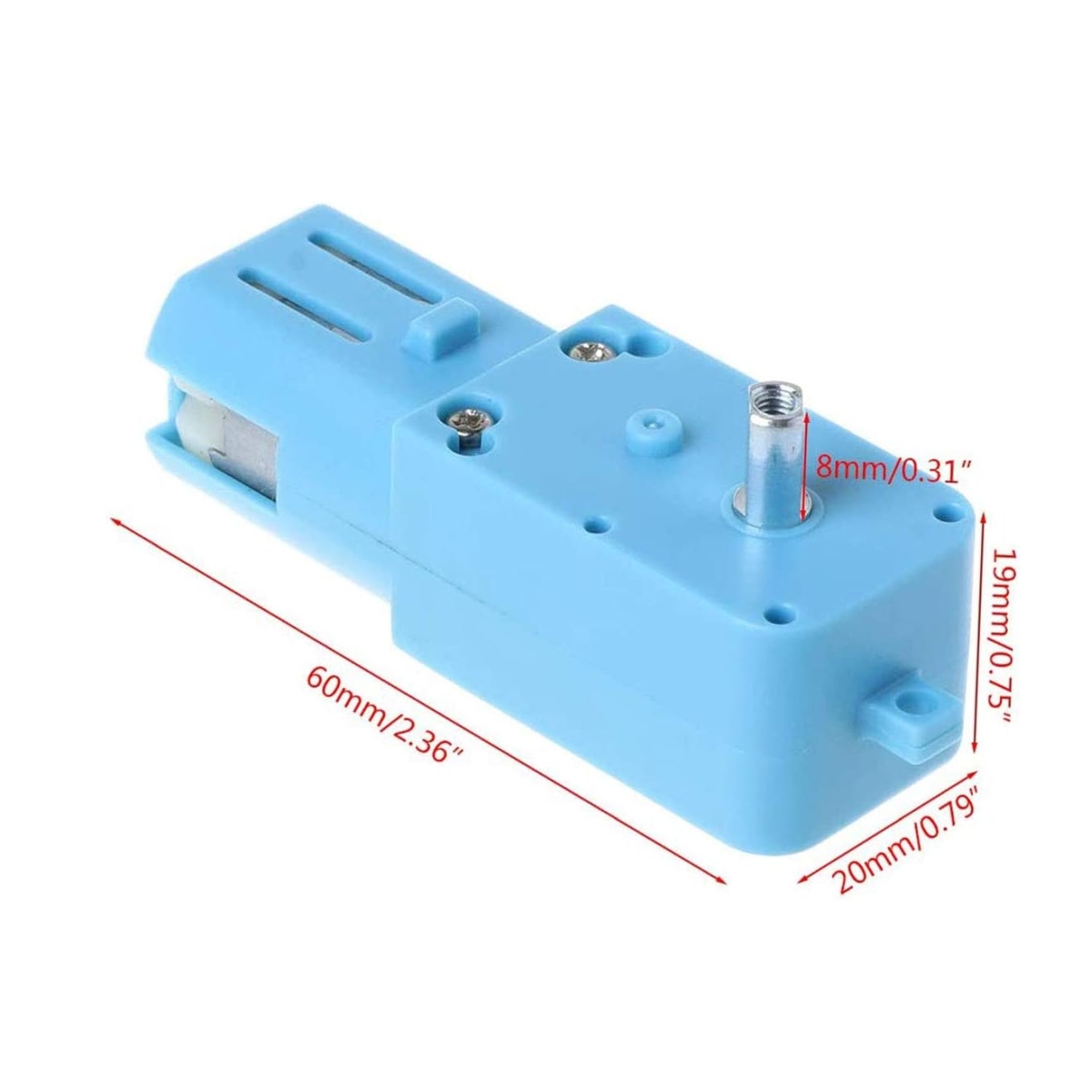
A Meghajtómotor (fém-áttétel, 2 oldalas) egy TT-formátumú, 3 V-6 V DC hajtóműves motor, fém fogaskerék-áttétellel és kétoldali tengelykivezetéssel.
Robotautókhoz, 2WD/4WD alvázakhoz, oktatási robotikai projektekhez és egyszerű automatizálási prototípusokhoz használható. Az 1:90 áttétel miatt nem a nagy sebesség az erőssége, hanem a lassabb, nyomatékosabb mozgás. Ez jól jön, ha a kis robotnak nem száguldania kell, hanem stabilan elindulni, fordulni, terhelést vinni. A kétoldali tengely praktikus kialakítás: az egyik oldalra kerülhet a kerék, a másik oldalra pedig például enkóder tárcsa, jeladó vagy kisebb segédmechanika.
Miért jó választás?
Mert egyszerűen beépíthető TT motoros robotprojektekbe, és a fém áttétel miatt jobban bírja a terhelést, mint a műanyag fogaskerekes TT motorok.
A gyakorlatban ez akkor hasznos, ha:
- robotautóhoz keresel nyomatékosabb meghajtást,
- 2WD vagy 4WD robot alvázat építesz,
- Arduino, ESP32, ESP8266 vagy Raspberry Pi vezérlésű projektben gondolkodsz,
- fontos a lassabb, jobban szabályozható mozgás,
- szükséged lehet kétoldali tengelyre enkóderhez vagy méréshez,
- 3 V-6 V DC motorral dolgozó oktatási vagy hobbi robotot építesz.
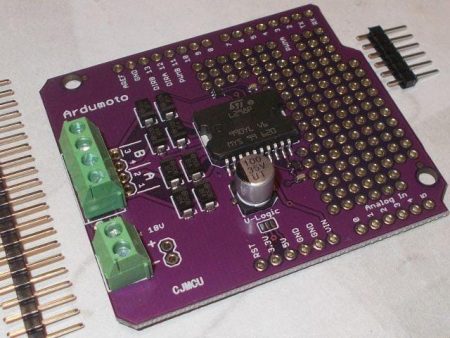
A motor közvetlenül mikrokontroller kimenetről nem hajtható meg. A vezérléshez H-hidas motorvezérlő szükséges, például L298N, L293D, vagy a motor áramigényéhez illeszkedő más motorvezérlő modul.
Mire használhatod?
Ez a fém áttételes TT motor különösen jól jön kisebb robotikai és prototípus feladatokhoz.
Tipikus felhasználások:
- 2WD robotautó – oldalanként egy-egy motorral.
- 4WD robot alváz – négy motorral, amikor a jobb tapadás és nyomaték fontos.
- Line follower robot – ahol előny a lassabb, stabilabb haladás.
- Arduino robotautó – L298N vagy L293D motorvezérlővel.
- Enkóderes mérés – a kétoldali tengely miatt jeladó tárcsa is szerelhető rá.
- Oktatási robotika – szakkörökben, tanfolyamokon, műhelymunkában.
- Egyszerű automatizálási próba – kis szállítószalag, adagoló vagy görgős továbbító kísérlethez.
Ha ilyeneket keresel: TT motor fém fogaskerék 1:90, 3V 6V hajtóműves DC motor 110 rpm, kétoldali tengelykivezetésű robot motor, akkor ez a motor jó eséllyel ebbe a kategóriába tartozik.
Kinek ajánlott?
Neked való, ha kis robotjárművet, oktatási robotplatformot vagy gyorsan összerakható prototípust építesz, és olyan motort keresel, amelyhez könnyen találsz kereket, alvázat és motorvezérlőt.
Jó választás lehet:
- hobbi robotépítőknek,
- Arduino alapú járműprojektekhez,
- iskolai szakkörökhöz,
- fejlesztői műhelyeknek,
- prototípusfejlesztéshez,
- kis kerekes demonstrátorokhoz.
Nem ez az ideális választás, ha kifejezetten halk működés, nagy pontosságú pozicionálás vagy hosszú akkumulátoros üzemidő a fő szempont. Fém áttételnél a működési zaj nagyobb lehet, és visszacsatolás nélkül a fordulatszám-szabályozás sem lesz precíz.
Bekötési és vezérlési tudnivalók
A motor két vezetéken keresztül hajtható meg. A forgásirány a polaritás cseréjével változtatható. Mikrokontrollerrel azonban nem közvetlenül, hanem motorvezérlőn keresztül kell használni.
Gyakori vezérlési felépítés:
mikrokontroller → H-híd motorvezérlő → TT hajtóműves DC motor → kerék / mechanika
Arduino esetén tipikus megoldás az L298N vagy L293D motorvezérlő. ESP8266, ESP32 és Raspberry Pi esetén is ugyanez az elv: a vezérlőpanel csak jelet ad, a motoráramot a motorvezérlő kezeli.
Sebességszabályzáshoz PWM jel használható. Irányváltáshoz H-híd szükséges.
Fontos: a motor induláskor és terhelés alatt nagyobb áramot vehet fel, ezért a tápellátást nem érdemes a mikrokontroller kis teljesítményű kimeneteire bízni.
Mire figyelj használat közben?
A motor tartósabb és használhatóbb lesz, ha a mechanika nincs túlfeszítve.
Érdemes figyelni ezekre:
- a kerék ne szoruljon,
- a tengely ne feszüljön,
- a motor ne dolgozzon tartósan beszorult állapotban,
- a tápfeszültség maradjon a megadott 3 V-6 V tartományban,
- a motorvezérlő bírja a motor áramigényét,
- a fém áttétel miatt számolj hallható működési zajjal.
A kétoldali tengely hasznos, de csak akkor, ha a másik oldalra szerelt elem nem terheli túl a motortengelyt. Enkóder tárcsánál különösen fontos a pontos, súrlódásmentes rögzítés.
Főbb jellemzők
- DC hajtóműves TT motor
- fém fogaskerék-áttétel
- robotautó és kis jármű meghajtáshoz használható
- H-hidas motorvezérlővel vezérelhető
- PWM sebességszabályzásra alkalmas megfelelő vezérléssel
- Áttétel: 1:90,
- Zaj: ~65dB,
- Tápfeszültség: 3V…6V
- Sebesség: 110rpm,
- Kivezetés: 2 oldalra, stift.
Csomag
- 1x meghajtómotor, áttétellel (fém; kék).







![Normál fém/csapágyas servomotor (MG995) [körbeforgó, 360 fok]](https://shop.tavir.hu/wp-content/uploads/robot-servo-mg995-metal-3-450x338.jpg)


Értékelések
Még nincsenek értékelések.