
Leírás
Ha egy projektnek tudnia kell, hol van, milyen gyorsan mozog, vagy mikor történt pontosan egy mérés, akkor előbb-utóbb képbe kerül a GPS.
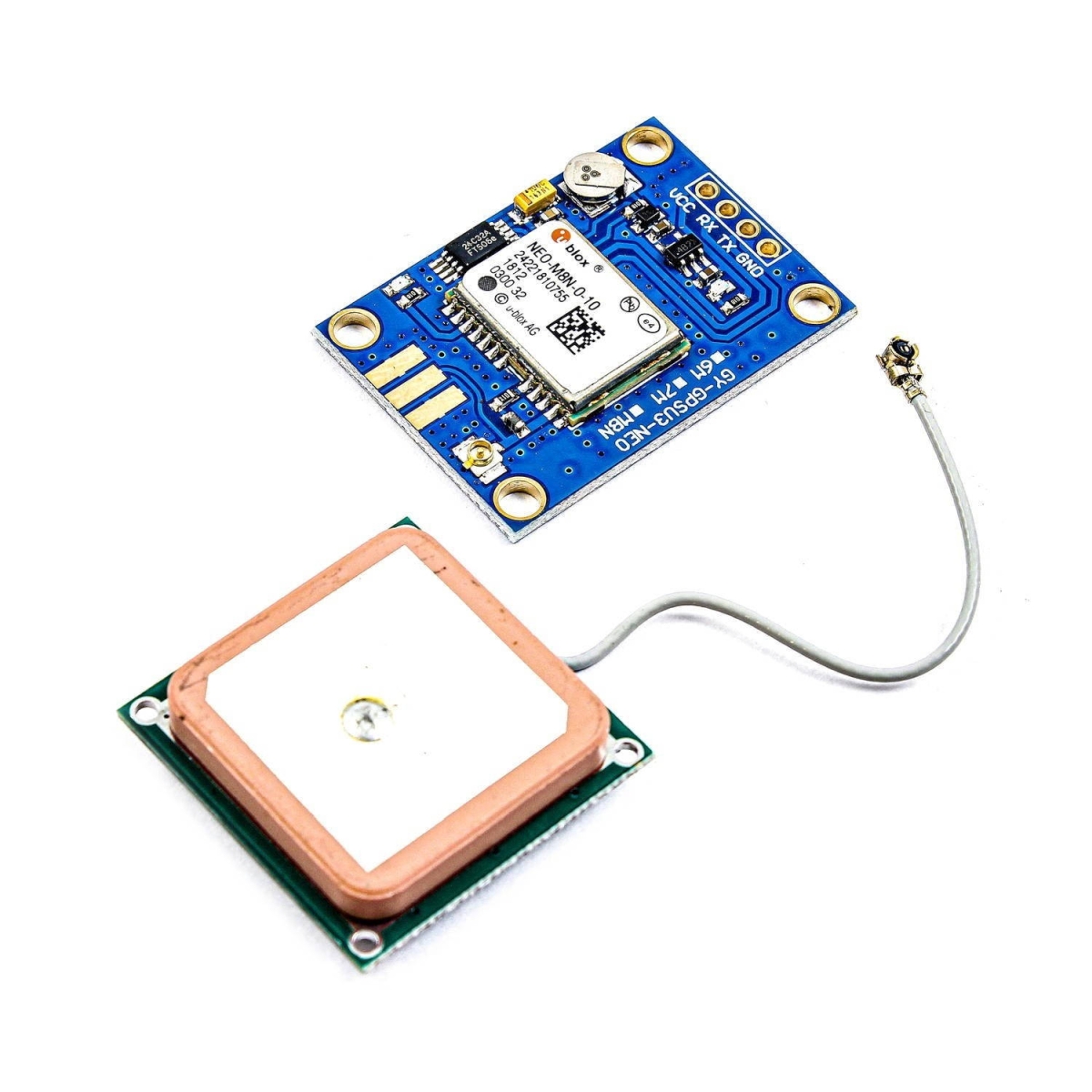
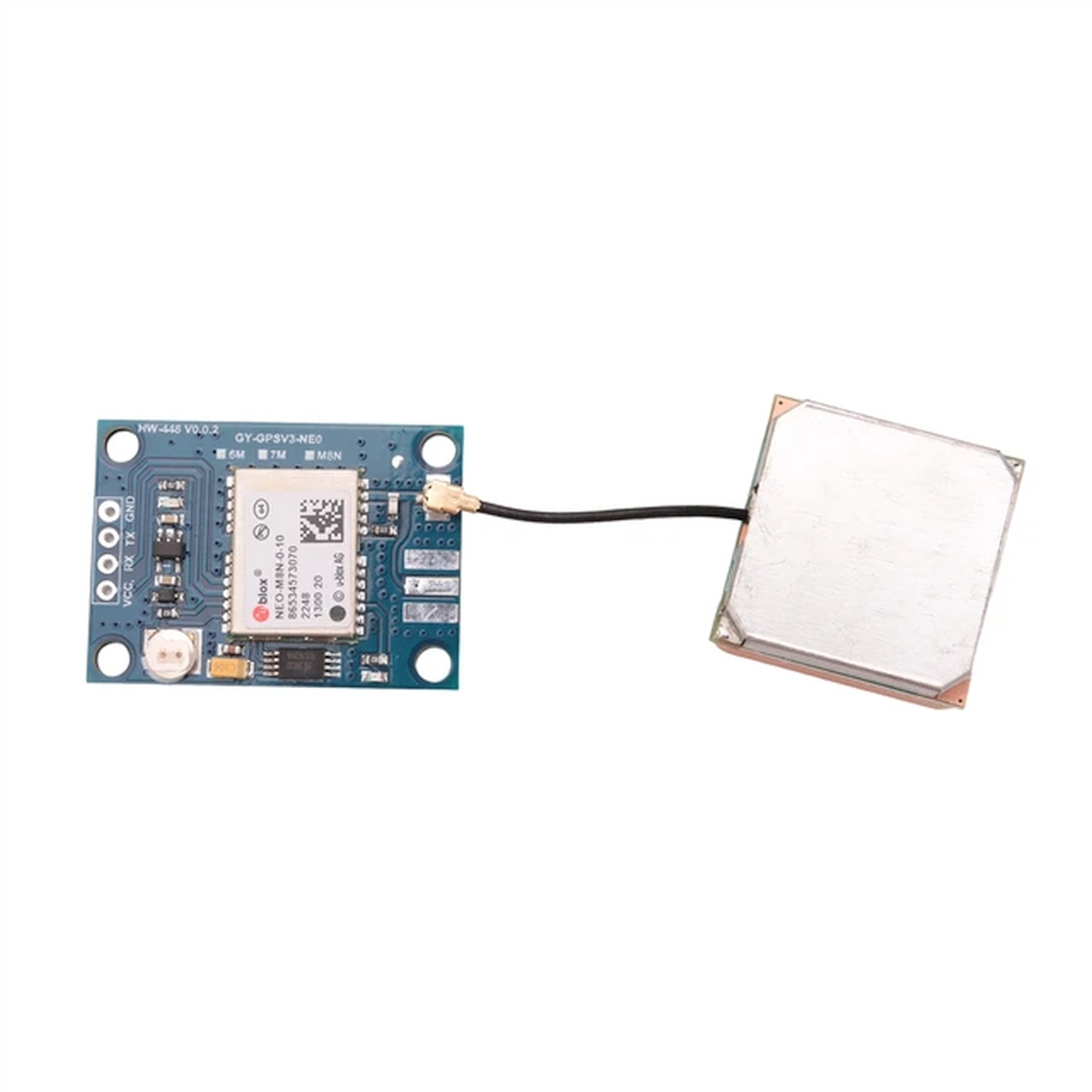
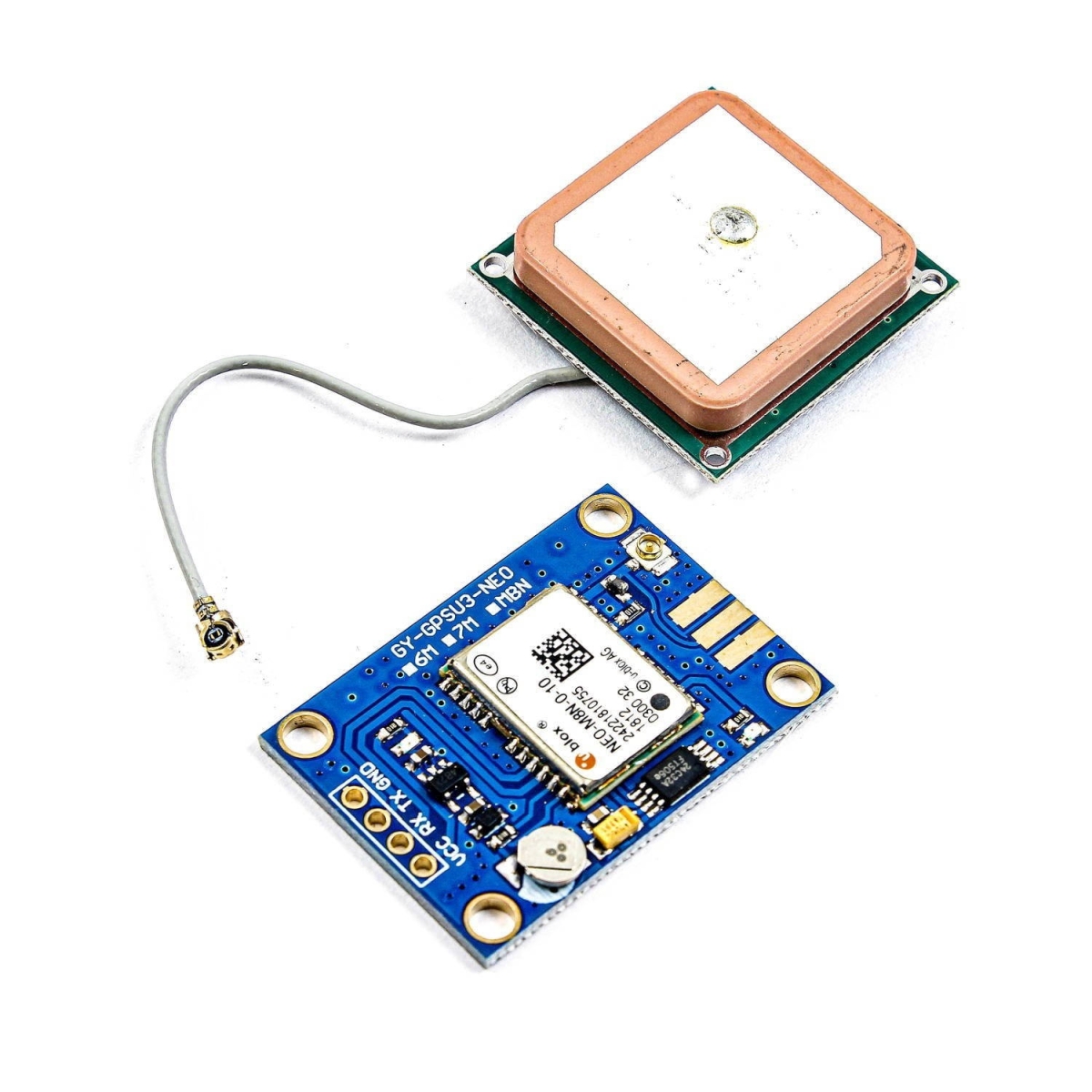
A NEO-M8N GPS modul egy u-blox NEO-M8N vevőre épülő, UART kommunikációs GNSS modul, amely pozíció-, sebesség- és időadatokat ad mikrokontrolleres vagy egylapkás rendszereknek. Nem önálló navigációs készülék, nem USB-s GPS egér, hanem egy beépíthető modul, amely soros porton küldi az adatokat a vezérlőd felé.
Arduino, ESP32, ESP8266 vagy Raspberry Pi mellé akkor jó választás, ha kültéri helymeghatározást, nyomkövetést, adatnaplózást vagy pontos időalapot szeretnél adni a rendszerednek.
A modul UART-on kommunikál, alapértelmezés szerint 9600 bps sebességgel, de a termékoldal szerint 1200-115200 bps között konfigurálható. Tápellátása 3,3 V vagy 5 V lehet, áramfelvétele körülbelül 40 mA, a panelen pedig uFL csatlakozó található külső antenna használatához.
Műhelytitok: a GPS nem attól jó, hogy “van”, hanem attól, hogy látja az eget
A GPS-moduloknál az első csalódás általában nem a programkódból jön, hanem a környezetből.
Az ember bedugja a modult az asztalon, beltérben, a laptop mellett, aztán várja, hogy azonnal legyen pozíció. Csakhogy a GNSS vevő nem varázspálca. Műholdjelet keres. Ehhez pedig nagyon nem mindegy, hol van az antenna.
A jó gyakorlat egyszerű: először próbáld ki ablak közelében vagy kültéren, tiszta rálátással az ég felé. Adj neki időt az első fixáláshoz (cold start: ~30 sec). Ha fém dobozba, járműbe vagy zárt készülékházba kerül a panel, a külső antenna nem extra kényelmi kiegészítő, hanem sokszor a stabil működés feltétele.
Ezért érdekes az uFL csatlakozó: a vevőpanel maradhat a dobozban, az antennát pedig oda teheted, ahol tényleg van esélye rendesen venni a műholdjeleket.
Miért jó ez a GPS vevő?
Mert ez a modul egy egyszerű soros adatforrássá teszi a GNSS helymeghatározást. Nem kell neked műholdas jelfeldolgozást írni. A modul veszi a GNSS adatokat, a vezérlőd pedig UART-on megkapja a feldolgozható üzeneteket.
- u-blox NEO-M8N vevőre épülő GNSS modul.
- UART kommunikáció TX/RX vonalon.
- 9600 bps alapértelmezett sebesség, konfigurálható soros kommunikációval.
- 3,3 V és 5 V tápellátási környezethez használható.
- uFL csatlakozó külső antenna illesztéséhez.
- RTC elemmel támogatott működés.
- GPS, GLONASS, Galileo, BeiDou és GNSS támogatás a termékoldal szerint.
- TinyGPS, TinyGPS++, Adafruit_GPS könyvtárakkal feldolgozható Arduino környezetben.
- 1 másodperces precíziós időalap időzítési feladatokhoz.
- Kültéri adatgyűjtéshez, nyomkövetéshez és telemetria-prototípusokhoz praktikus.
Azaz ha a projektednek koordináta, idő vagy mozgási adat kell, ez a modul megadja azt a nyers eredményt, amiből a vezérlőd már tud dolgozni.
Hogyan működik?
A NEO-M8N GPS modul műholdas helymeghatározási adatokat fogad, majd azokat soros kommunikációval továbbítja a vezérlő felé. A mikrokontroller oldalán ez úgy néz ki, hogy a modul TX kimenete adatokat küld, a vezérlő pedig UART-on olvassa ezeket. A beérkező sorok jellemzően NMEA jellegű üzenetek, amelyekből könyvtár segítségével kinyerhető például:
- földrajzi szélesség,
- földrajzi hosszúság,
- időadat,
- dátum,
- sebesség,
- irány,
- fix állapot,
- műholdinformáció.
Arduino környezetben erre gyakran használják a TinyGPS++ vagy Adafruit_GPS könyvtárakat. Ezek leveszik a válladról az NMEA sorok kézi feldolgozásának nyűgét: te már kész értékekkel dolgozhatsz a programban.
A modul nem USB-n adja az adatot, hanem UART-on. Ez fontos különbség. Ha számítógéppel szeretnéd közvetlenül konfigurálni vagy figyelni, akkor USB-soros illesztőre vagy megfelelő fejlesztőpaneles kapcsolatra lehet szükség.
Mire használhatod?
Ez a modul ott hasznos, ahol a projektnek kültéri pozíció- vagy időadat kell. Tipikus felhasználási ötletek:
- Arduino alapú GPS adatnaplózó SD kártyával,
- ESP32 Wi-Fi-s telemetria, amely koordinátákat küld MQTT-n vagy HTTP-n,
- ESP8266-os egyszerű nyomkövető prototípus,
- Raspberry Pi alapú NMEA logger,
- jármű- vagy eszközkövetési kísérlet,
- kültéri mérőállomás pontos hely- és időadattal,
- LoRa vagy GSM adatküldő GNSS koordinátákkal,
- időszinkron feladat 1 másodperces időimpulzus jellegű kimenettel,
- robotikai vagy mobil eszközös projekt kültéri navigációs alappontokhoz,
- fémházas eszköz, ahol a külső antenna külön elhelyezhető.
Az igazi ereje nem az, hogy “GPS van rajta”, hanem hogy a vezérlőd számára feldolgozható, soros adatként teszi elérhetővé a hely- és időinformációt.
Mire nem ideális?
Pont azért, hogy ne ebből legyen a későbbi csalódás, ezt is érdemes kimondani. Ez a modul nem ideális, ha:
- stabil beltéri helymeghatározást vársz tőle,
- centiméteres RTK pontosságra van szükséged,
- USB-s GPS vevőt keresel közvetlen PC-s használatra,
- kész navigációs eszközt szeretnél kijelzővel és térképpel,
- antenna nélkül, zárt fém dobozban használnád,
- 5 GHz-es vagy más rádiós kommunikációt vársz tőle,
- olyan rendszert építesz, ahol a pontos RF kivitelezést nem tudod ellenőrizni.
A GPS kültéren, jó antennával és megfelelő égboltrálátással érzi jól magát. Beltérben, mélygarázsban, vastag falak között vagy fémházas készülékben a fix ideje és pontossága romolhat.
Kompatibilitás
- Arduino: UART-on illeszthető. Az NMEA adatok feldolgozásához TinyGPS++, TinyGPS vagy Adafruit_GPS könyvtár használható. Arduino UNO/Nano esetén figyelni kell arra, hogy a hardveres soros port gyakran a PC-s programozással és soros monitorral is közös.
- ESP8266: Használható UART-on, de itt különösen figyelni kell a soros port kiosztására. Az ESP8266 debug üzenetei és a GPS kommunikáció ütközhetnek, ha nem tudatosan választod meg a lábakat és a soros portot.
- ESP32: ESP32 mellett kényelmesebb a helyzet, mert több hardveres UART is elérhető. Ezért a GPS modult külön soros portra lehet tenni, miközben az USB-s soros monitor megmarad hibakeresésre.
- Raspberry Pi: UART-on keresztül illeszthető. Linux alatt a soros port engedélyezése, a konzolhasználat leválasztása és az NMEA sorok olvasása szükséges.
- Egyéb mikrokontroller: Bármely UART-tal rendelkező vezérlőhöz illeszthető, ha a tápellátás és a jelszintek megfelelnek.
Bekötési figyelmeztetések
A termékoldal 3,3 V / 5 V tápellátást és 5V/3V3 jelszintillesztést említ, de a konkrét TX/RX jelút és jelszint-kezelés panelverziótól függhet. Ezért bekötés előtt érdemes ellenőrizni a dokumentációt és a panel feliratait. (TavIR WebShop)
A tipikus UART bekötési logika:
- GPS TX → vezérlő RX
- GPS RX → vezérlő TX
- VCC → 3,3 V vagy 5 V a panel specifikációja szerint
- GND → közös föld
Műhelytitok: ha nem jön adat, először ne a könyvtárat hibáztasd. Nézd meg, hogy a TX és RX nincs-e véletlenül fordítva kötve, közös-e a GND, megfelelő-e a baud rate, és lát-e egyáltalán műholdat a modul.
Antenna és elhelyezés
A panel uFL csatlakozóval rendelkezik külső antenna használatához. Ez különösen akkor hasznos, ha:
- a modul készülékházba kerül,
- a panel fém vagy árnyékoló elem közelében van,
- járműben használod,
- a doboz belseje nem ideális műholdvételhez,
- az antennát külön, jobb vételi helyre szeretnéd tenni.
Az uFL csatlakozó kicsi és érzékeny RF csatlakozó. Ne rángasd a kábelt, ne feszítsd oldalra, és ne úgy kezeld, mint egy robusztus sorkapcsot. Finoman pattintsd rá a megfelelő antennakábelt.
Műhelytippek a használathoz
- Első tesztnél menj ablak közelébe vagy kültérre.
- Adj időt az első műholdfixhez, főleg hidegindítás után.
- Ellenőrizd a baud rate-et: alapértelmezés szerint 9600 bps.
- Soros monitorban először nézd meg, érkeznek-e NMEA jellegű sorok.
- Arduino UNO-nál kerüld a hardveres Serial ütközését a PC-s monitorral.
- ESP32-n inkább külön hardveres UART-ra tedd a GPS-t.
- Raspberry Pi-n kapcsold ki a soros konzolt, ha ugyanazt az UART-ot használnád.
- Külső antennánál ügyelj az uFL csatlakozó óvatos kezelésére.
- Ha fém dobozba kerül a modul, az antenna kerüljön ki a dobozon kívülre.
- Pontossági tesztnél ne beltéri asztalon mérj, mert az félrevezető eredményt adhat.
Műszaki adatok
- Vevőcsalád: u-blox NEO-M8
- Modul altípus: NEO-M8N-0-10
- Kommunikáció: UART, TX/RX
- Alap UART sebesség: 9600 bps
- Konfigurálható UART sebesség: 1200-115200 bps
- Tápfeszültség: 3,3 V / 5 V
- Áramfelvétel: kb. 40 mA
- Antenna csatlakozás: uFL külső antenna csatlakozó
- RTC elem: igen
- Támogatott rendszerek a termékoldal szerint: BeiDou, Galileo, GLONASS, GNSS, GPS
- Időalap: 1 sec precíziós időalap
- Működési hőmérséklet: -40…+85 °C
- Méret: 35 × 23 mm
- Tömeg: 25 g
- Könyvtártámogatás: TinyGPS, TinyGPS++, Adafruit_GPS
- PC szoftver támogatás: u-blox konfigurációs szoftveres irány
Dokumentáció
- NEO GPS modul – Műszaki dokumentáció, Arduino eljáráskönyvtár, adatlap, UBlox PC GPS konfiguráló szoftver (Windows)
- Gyártói honlap
Csomag
- 1× NEO-M8N GPS modul
Rövid SEO leírás
NEO-M8N GPS/GNSS modul UART kommunikációval mikrokontrolleres helymeghatározási, adatnaplózási és nyomkövetési projektekhez. 3,3 V / 5 V tápellátás, 9600 bps alap UART sebesség, uFL külső antenna csatlakozó, RTC elem, TinyGPS++, TinyGPS és Adafruit_GPS könyvtártámogatás Arduino, ESP32, ESP8266 és Raspberry Pi rendszerekhez.
Meta cím javaslat
GPS modul NEO-M8N – UART GNSS vevő Arduino, ESP32 és Raspberry Pi projektekhez
Meta leírás javaslat
NEO-M8N GPS modul UART kommunikációval, uFL külső antenna csatlakozóval, RTC elemmel és 3,3 V / 5 V tápellátással. Ideális Arduino, ESP32, ESP8266 és Raspberry Pi alapú helymeghatározási, adatnaplózási és nyomkövetési projektekhez.









Értékelések
Még nincsenek értékelések.